
shape investigations

During the first brainstorming phase we came up with the main idea and many others (show presence of the partner, the weather, both times, day/night, leave a message by using a ball to put into a drawer, touch a soft window etc… ). There were two rapresentations: a cube and a house.

All together we understood that the house as metaphor was the right one and we decided to design a three-dimensional house. At this stage we deleted some ideas and added others (show the time by using a rotating door, hang the house and use a door bell to send sound).

We decided to create a family of houses and investigated various interactions according to different materials (paper, ceramic, plexiglass, wood). The paper version could be semitransparent, fragile, elegant and we could use rss feeds to show the weather and day/night.

The ceramic one would be elegant, heavier and permit a user to knock on it and produce sound into its twin or put a nightlight into it which would turn on the light. The plexiglass one could show the weather, day/night or be pulled.

The wood version could show the time with a rotating door which would allow someone to knock on it. We had on hand a lot of possibilities but we understood that we had to leave some of them out.

We drew some 3-D renderings to understand and communicate how they should look and their context of use.

We draw several scenarios to understand the kind of interaction that would be most suitable of each material.

We brainstomed all the four possibilities again. The paper version would hang, show the presence of the other, the weather and the day/night. Moving it, the second house would move. The ceramic one would present only one interaction: the warmth of a nightlight would turn on a LED in the other house.

The wood version would show both presences in the same house. The window would show the partner-presence and the door one’s own presence. Turning one’s own house would switch its light from yellow to blue.
The plexiglss one would show the weather, day/night, presence, and rocking it would produce sound. It would possible to leave a message just by opnening a chimney. The partner would listen to the message by opening the window.
After that we decided to develop only three versions: paper, ceramic, plexiglass.

We started very early to make a lot of models to find the right shape and kind of paper.

At the same time we started to experiment with the light effects. We threw away the idea of showing weather because the result was not satisfying. At that time we also investigated the behaviour of the light which would show presence.

We also started immediately to investigate the clay version and modeled the first idea for house and window shapes.

The plexiglass house was the last that we developed. We cut the plexiglass (special thanks to Filippo Mastinu and Matteo Torcinovich), scratched the surface to make it matt and glued them together.

Very soon we found the right behaviour for the paper version.

These are the models that we had when we started the prototyping workshop. The paper one was the definitive shape, the ceramic one had no chimney and the plexiglass one had a spherical base. For this one we wanted colours as output. The colours would change according to the inclination of the other house.

from left to right: bilding the structure for the leds, circuit for the paper house
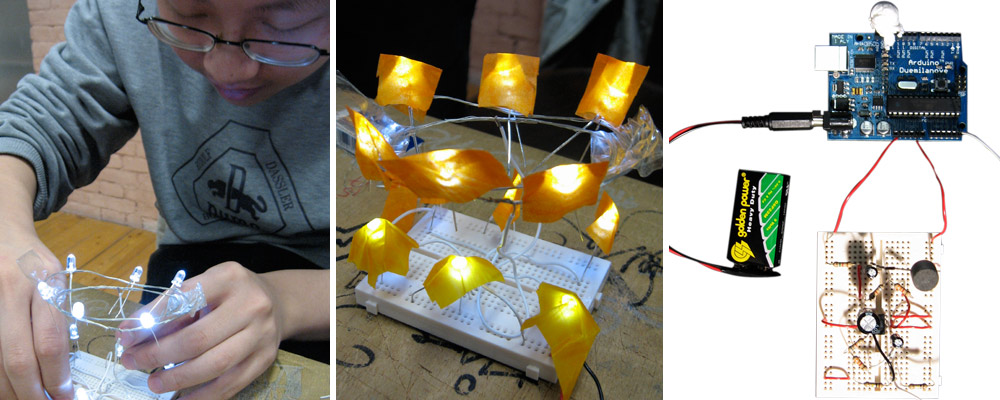{kind=link}
To diffuse the light into the paper house we used two layers of LEDs.

setup of the ceramic prototype
For the prototype of the caramic version, frist of all we made a circuit for the LDR sensor on an Arduino and another one to controll the LED. Leater we decided to replace the code on both Arduinos in order to have the same I/O in both houses.

from left to right: considering the motors possibilities, servo motors, the definitive shape
For the plexiglass pair, we decided to return to our first idea: by rocking one house rock, the second one moves as it by unknown hand. We studied first how to make it stable. We decided to use servo motors. Since servos rotate in just one direction we changed tha base (thanks to Tom Hulbert) from a spherical shape to a convex one.
liaison | mood, users, context | paper | ceramic | plexiglass | code, physical computing | early investigations | critical assessment | credits | download